Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
Oooh, my head...
What's a brick?
Can someone explain how Sidewinder works? If those wheelmounts aren't gimballed then how does it not lock up?
Sat May 14, 2011 10:14 am
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
A brick is a bot with heavy armour and plenty of speed, usually with vertical sides. The idea is to ram the opponent and break parts shock, or at least to take control and push it around.
Sidewinder uses onmiwheels like this:
With an OMX3 mixer from the Robot Marketplace. The combination allows you to do the same functions as your bogey design, but with half the motors and far less weight. The down side to omniwheels is that they are relatively delicate and need protection.
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
I'm curious what everyone thinks about position encoders.
These ESCs (electronic speed control?) I'm guessing must have some kind of position feedback. I can't imagine a featherweight stopping on a dime, without accel/deccel control. So, absolute, incremental, analog... all with +'s and -'s.
What's the general consensus. I was thinking of going analog.
Sat May 14, 2011 3:25 pm
dyrodium Experienced Roboteer
Joined: 24 Aug 2004
Posts: 6476
Location: Sydney
No feedback in any combat robot esc I know of, you simply get regen to stop your bot as soon as you let off the throttle. Some people use gyro's to assist in heading but that affects the signal fed into the esc, they're fairly 'dumb' as far as motor controllers go, but nice and durable. _________________ ( •_•)
No feedback. They are RC so the driver compensates for everything. Any form of encoder would not last very long.
One thing I did think about was using backEMF to detect the motor speed but I didn't really see much advantage to it. Only thing it would have been good for is stall detection. _________________ Steven Martin
Twisted Constructions
http://www.botbitz.com
Sat May 14, 2011 3:28 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
Wow, no wonder the drivetrains take a beating, blows notwithstanding.
Anyone use accelerometer modules, like the Sparkfun ones?
Well yes but if you increase any decent form of delay in the control it just makes the robot undrivable. There is usually a slight delay in the controller which limits the speed at which you can go from full forwards to reverse.
Only use of accelerometers is for melty brains really. (Usually one or two wheeled robot which spins and pulses on/off motors to do translation)
I have thought about encoders, I don't see anything inherently fragile about them. You could get better steering response and straight line with encoders than gyro I'd think.
Gyro + encoder would be better still.
not enough roundtoits to actually try anything though _________________ Mechanical engineers build weapons, civil engineers build targets
Sun May 15, 2011 12:54 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
My programmer guy is a fine human being. He cracked the I2C master slave protocol. Damn, does it get any better? Master controller not talks to slave bogie/weapon controller.
2nd thing, encoder fully functional
Sun May 15, 2011 5:42 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
capable of putting bogies in posttion for tank or ackerman, but also pipeline stack of preprogrammed positions.
Sun May 15, 2011 5:44 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
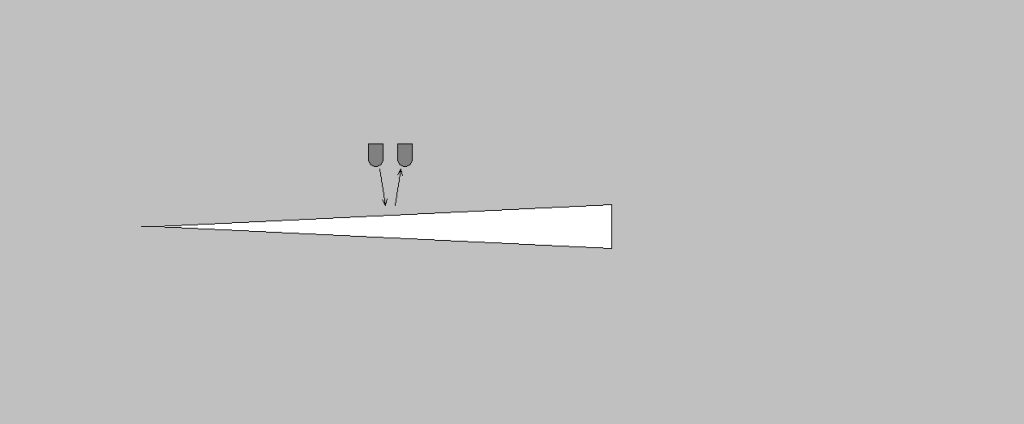
Encoder is IR emitter-detector pair, ambient light immune, reflecting off white-painted wedge positioned radially along bogie rim.
Sun May 15, 2011 5:46 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
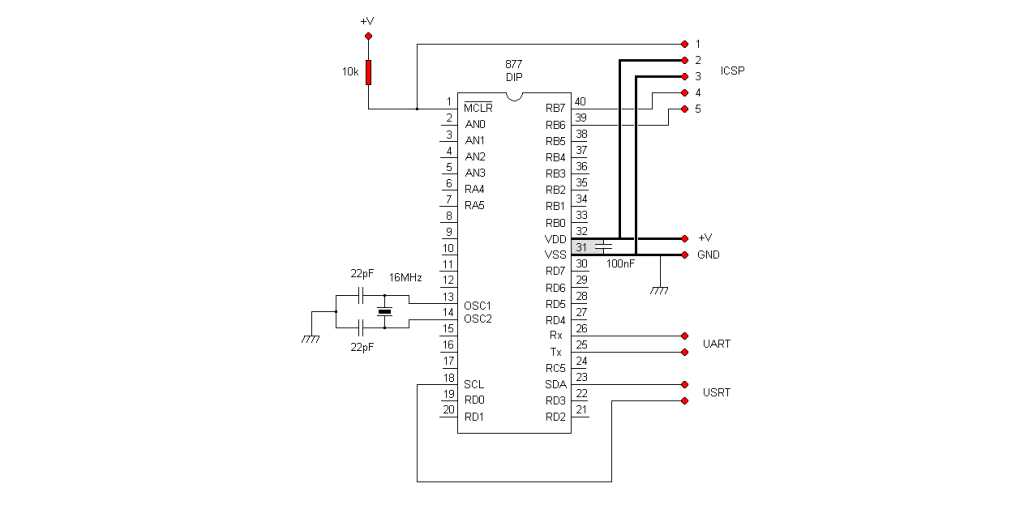
There's any one of a 1000 ways to do it, but here's what works for me. This is the master. DIP on perfoard so easy to hack&change.
Slaves are quad flat packs. DIPs from Jaycar ~$13, QFPs from Farnell also ~$13
Sun May 15, 2011 8:52 pm
frogbiscuit
Joined: 26 Aug 2010
Posts: 82
Location: Wollongong
Progress continues, but as they say, the devil is in the details.
So easy to get bogged down in brackets and linkages, a far cry from the lofty concepts at the outset. I never figured.
Much as I'd love to make a commitment, the outcome is presently to unclear. This I will say, there's a 90% chance a featherweight will be ready mid 2nd half of the year.
Been getting some good pointers from you guys, making the waters less murky.
You cannot post new topics in this forum You cannot reply to topics in this forum You cannot edit your posts in this forum You cannot delete your posts in this forum You cannot vote in polls in this forum

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports