|
|
|
|
Jason Team Grimlock
Joined: 06 Jan 2007
Posts: 95
Location: Sydney-nsw-bondi


|
ItSS ALIIIVEEE!!!!
Well Its been a crazy few weeks for me that did leave me not being able
to anything on the um, big spider, but the small spider, yes now theres
two, is alive and perambulating!
Angus did get a shot of it on his camera to post-but its not up just yet, well
see if we cant rectify that over the weekend, but hell be coming along next
weekend to strut his stuff 
For now, though I can say that building a smaller version has answered many
questions I had in my mind-and pointed me to some concepts which Id
like to incorporate into the big spider. Ill cover those at a later time.
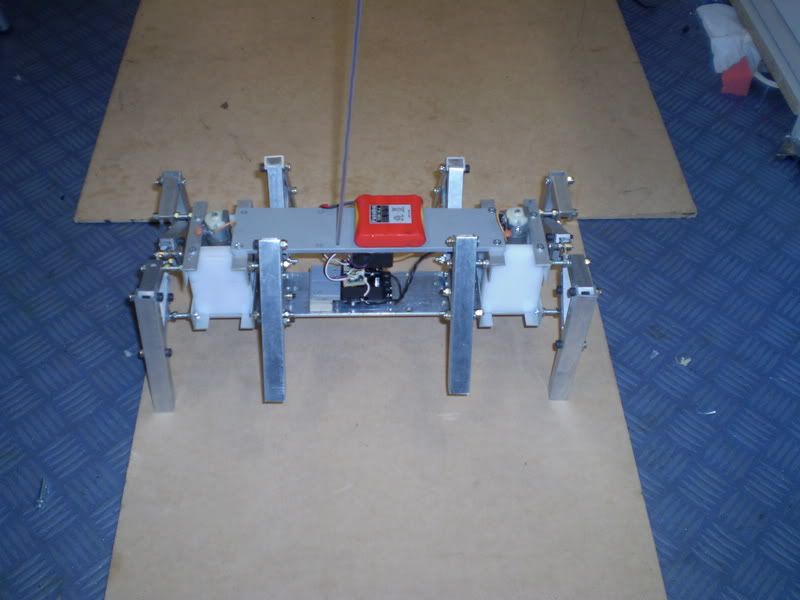
It weighs around 1.2kg i think now. it has over 300 parts in this one and
36 points of articulation. V1.0 was driven by 4 servomotors, V2.0 is driven
by a pair of tamiya gearboxes putting out 809gm torque at 1cm. Each
box drives a four leg module, the two modules are joined by an upper and lower chassis plate. Electrics sit on the lower plate with the batteries on top
for now-ill move those inboard. It is made of aluminium and plastic.
I have fitted ceramic caps to the motor cans and taken an earth lead back
to the servo boards-it was getting some rf noise when i first tested
it, but the mods seem to have responding well to the radio now. This
had to be done as the legs need to be quite loose at the joints-loose
metal banging together can generate rf noise.-but the upside of the
loose joints is that it allows the robot so settle all four legs down firmly
with each step.
Those little gearboxes surprised me with there speed and power. It walks
a treat, reminds me of the facehuggers from alien! - like the mondo
spider it kinda scrabbles along in weird, sea sick kinda way thats cool at
the same time, My concerns about how the robot might change direction
were quickly displelled as well. Not only does it does it turn happily on the
spot but it u turns as well. ive put optical encoder wheels on the gearbox shafts so I can Play around with some feedback and pic chip control.
Hes got this really really cooooll noise when he walks-the big bot should
be lot of fun. Ive named my spiders Gramul,The Many!-a spider
from the second book of the never ending story-Im planning a few
fun mods and additions to it, And it may just have one other cool
feature to show off next week!-thanks for dropping in on the spiders!-
Now Ill see if we cant get one damn pic up here
-jas
|
 Thu Nov 08, 2007 8:20 pm
Thu Nov 08, 2007 8:20 pm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports