Joined: 30 Sep 2006
Posts: 673
Location: Perth, Western Australia
@ Nick: What sort of calculations are you doing to size the motors? The only way that I have been working so far is to assume a maximum power, then determine the speed from the voltage, and derive the torque.
Is there some formula for the starting torque of brushless, apart from the fact that their starting toque is low?
If that is the way that you have been doing it then I can safely say that it was my loose belt that cause my motor to fry, not my bad coice of motor / gear ratio. _________________ They say that he crossed the fine line, from insanity to genius.
Tue Feb 12, 2008 11:02 pm
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
I am not really doing any calculations for motor sizing, its more a comparison back to the power of a brushed motor I *think* would spin the ring up. I was looking at the motor performance graphs on the Neumotor site and they suggest that torque is fairly constant down to 200 rpm or lower. I can't really find any good data on what the start-up torque would be so an over-sized motor with plenty of gear reduction looks like a safer bet - only live testing would tell. Given the really low cost of the motors buying several for testing is quite possible for most builders
Slightly OT: I only had a few minutes cruising the United Hobbies site at lunchtime, but I couldn't see the high current ESC that Glen uses on his brushless; is it still available? _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
Tue Feb 12, 2008 11:47 pm
Glen Experienced Roboteer
Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
it is but its been rebadged as a TURNIGY brand. as for the torque side of things thats an interesting comparison to brushed motors. how would the simple lack of having brushes affect the starting torque?
i would think the limitation would be on sensorless types but even so the slightest nudge of your weapon should get everything aligned and turning normally.
altho i still think those flat type brushless motors andrew and mack where using are just too small.
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
Jake seems to know most about sensorless brushless motor startup problem, so what he said. Once they get turning they seem to be fine, its getting the initial position sense thats the problem; After reaching a few rpm everything should sort itself out. 5330 size? I was looking at a discount pair of Neu 1521 motors 1.8Kw for 30 sec each. That's after I try out some cheap United motors, of course.
Edit:
Flat brushless motors? I am not familiar with them, got any info? _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
Wed Feb 13, 2008 12:11 am
bytraper
Joined: 31 Oct 2005
Posts: 195
I've actually decided to go for 2x 24v Dewalt hammer drill motors to power the ring.. (Nicks original suggestion - Thanks).. The reason I chose these was mainly because of the speed and HP and weight of the motors, well.. that and I was worried about the startup torque blowing the ESCs or the motors or both...
Ive also found some decent and strong mitre gears which will do the trick quite nicely... and let me use up to 3 motors to power the ring but weight will be a considering factor as well as the timing of the motors... I need them to run at the same speed
Nick - The shell itself weighs in at 5.4KG without any teeth... Teeth will being it up to around 6.6kg.
Wed Feb 13, 2008 9:49 am
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
If you are talking about mitre gears, I assume you are running the friction drive wheels directly on the ring and not on a flange? The 24V DeWalt motors are pretty powerful but nobody over here has used them yet - Two of them should do the trick and you probably won't have any spare weight for three. Mounting a mitre gearbox on the end of one might be a challenge, don't forget to support the rear of the motor. _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
Wed Feb 13, 2008 11:25 am
Knightrous Site Admin
Joined: 15 Jun 2004
Posts: 8511
Location: NSW
Two of those motors are probably just going to shag your A123's like nothing Didn't Jeff F nearly fry a pack of 3600's with a pair of 18v dewalt motors on vert spinner. _________________ https://www.halfdonethings.com/
Wed Feb 13, 2008 12:18 pm
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
I recall that they were rather toasty after the first battle - I think it was a case of bad gearing, Jeff had a large diameter disk with little gearing and was probably trying to spin it at an insane speed. That just backs up my suggestion about using a large reduction ratio - it will reduce current consumption and increase torque for a fast spin-up. _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
Wed Feb 13, 2008 12:51 pm
Glen Experienced Roboteer
Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
dewalts are current hungry pigs. the two old style 18v in mine heat up to red hot in less than a minute of just gentle running. they love the current
read up on the problems with the 24 ones too i believe they had bad brush issues. theres heaps of modified parts on the RMP for them _________________ www.demon50s.com - Minimoto parts
http://www.youtube.com/user/HyzerGlen - Videoooozzz
Wed Feb 13, 2008 2:36 pm
bytraper
Joined: 31 Oct 2005
Posts: 195
Yeh the dewalt 24's have a few problems :/ mainly as glen says with the brushes.. they melt if its overvolted or stalled for too long..
I've ordered 2 of the 24v hammerdrill motors and 2 of the "High Temp Brush Housing with Adjustable Timing for Dustin & Dewalt 24V Motors"
Which I'll need to get the motors running at identical speeds..
But the current draw for the 18v dewalts and the 24's are virtually identical..
Still, I'll gear the output down until I get to about 2000-2250rpm for the shell so with the dual motors they wont be overworked... Besides... I think the inner shell will spin before it gets anywhere near stalling anyway...
Anything more in the way of speed and as Nick mentioned there'd be the worry about detonation..
Nick I'm going to make suspension shafts to connect from the output shaft of the dewalt to the square input of the miter gears, they will connect onto a dual plate (sandwich) on the top and the bottom which will turn a vertical shaft (think of a differential). I could have gone with a single plate, but the more teeth touching the shaft gives me a feeling of safety that the shaft will hold. From there I'll gear it down to contact with the chain link running around the inner shell...
I managed to find some pretty sturdy miter gears that should be suitable for the torque!
Been a while since my last post... Figured I'd bring everybody up to speed...
The mitre gears I was originally going to use have been scrapped... no where NEAR strong enough.. Those dual overvolted dewalts pump out some serious power... way too much for those gear heads... Anyway, being in the industry I am, I managed to score some steel mitre gears off a customer for free MUCH stronger and should be pretty robust!! and if not.. well I have spares
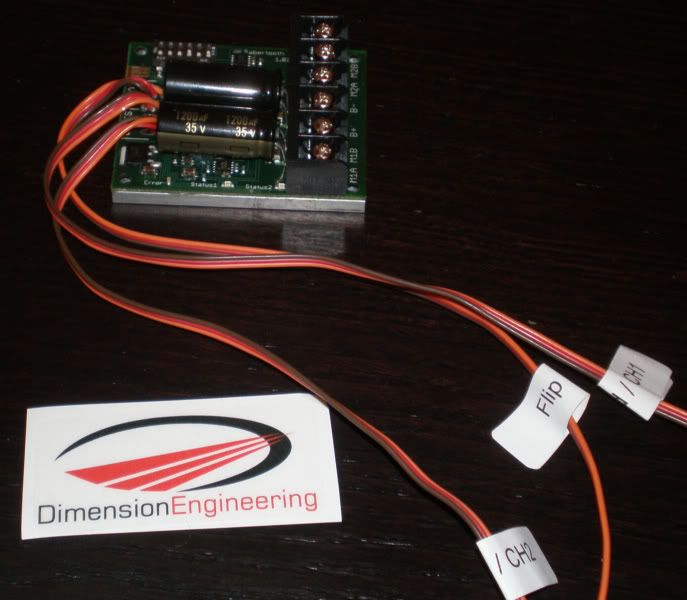
Finally got my Sabretooth 2x25 Combat Prototype. Similar to the Standard 2x25 but it just takes a hell of a lot more amperage than normal
On top of that, it also has a flip feature so when the bot gets inverted... well you know the drill!!!
Prototype, only one if its kind in existance. 50 Cont, 100A Surge. Thermal and Overcurrent Protected plus some other mods that I forget.
You can drink in its glory in the pictures below
Finally, the shell...
It looks pretty good.. Should do some serious damage The dual dewalts will surely spin this sucker up HELL fast!!! Weight may end up being a problem.. but I can always forgo things... like wheels and motor... lol... who needs agression points anyway
Such is robot wars I guess... Always a challenge to make something better and stronger..
Thinking about it, it would have been much easier to make a FBS.. But then again.. everybody does that... Besides... if I did that I'd be wasting the FLIP control on the Sabretooth...
Theres probably more Ive forgotten and some things have been updated.. but you get the gist of things...
Tue Mar 11, 2008 5:44 pm
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
That's some noice welding! _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
Tue Mar 11, 2008 8:45 pm
Fish_in_a_Barrel
Joined: 30 Sep 2006
Posts: 673
Location: Perth, Western Australia
I'm impressed. You look like your taking after Nick with the amount of precision that seems to be going into this bot. _________________ They say that he crossed the fine line, from insanity to genius.
Tue Mar 11, 2008 10:05 pm
bytraper
Joined: 31 Oct 2005
Posts: 195
yeh I figure the better it's made the longer it'll last.. besides, i can't handle shoddy work!!
And I have to admit... I do think Nicks bots are definately above average
Tue Mar 11, 2008 10:13 pm
Nick Experienced Roboteer
Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
Trouble is: after we destroy all the other bots, then our bots become the new average. Ya can't beat statistics! _________________ Australian 2015 Featherweight champion
UK 2016 Gladiator champion
You cannot post new topics in this forum You cannot reply to topics in this forum You cannot edit your posts in this forum You cannot delete your posts in this forum You cannot vote in polls in this forum

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports