Joined: 16 Jun 2004
Posts: 11802
Location: Sydney, NSW
Interesting! Those jaws look a bit light though, Even though your opponents are likely to have relatively crushable frames, the jaws look like they could use some bracing. Do you have access to FEA analysis?
Sat Apr 13, 2013 5:39 pm
dyrodium Experienced Roboteer
Joined: 24 Aug 2004
Posts: 6476
Location: Sydney
Heh yeah I just threw those together really quickly for testing the movement, they're in no way what the final jaws will be like! I can do decent enough force analysis in solidworks which should help a lot in getting a system that'll cope with the force from the winch motor. _________________ ( •_•)
Surprisingly, the winch turns WAY faster than I expected, that's on 5s though and possibly not a great idea for combat... What voltage does wanda run on?
The tricky part will be to join both acme and that 12T spline together, and simply lathing them won't be possible as they're all hardened to hell and back. Will have to get a grinder attachment going for the ol' lathe like glen made...
Very rough mockup, it'll probably be a T shape with the huge crusher assembly trailing the wheels and frame. IBC is just a placeholder, I need to buy more tz85as.
Joined: 19 May 2010
Posts: 3973
Location: ipswich QLD
Nice..that brass pulley looks exceeding ly fancy...your winch has a different pinion on the end then ours.....also ours are 2000bl so not sure if your winch will be more or less brutal on the tz's...Wanda is 5s ...at the last event it was cutting out...but steve reckons it might be our mixing set to 120% in tx software..also they have an early tz firmware so that needs to be updated to:D
You will find that winch has the 3-stage gearboxes like the ones we stripped down for Double Dragon. There is 1 stage inside the motor end and 2 more stages in the end support on the other side of the spool. The first stage is only ~5.2:1.
The 2000lb winch motors are like the ones I used in T2M / RageQuit (and Wanda) and have a special gearbox in that that does 130:1 in 1.5 stages (it's complicated but simple). _________________ https://www.halfdonethings.com/
Hmm... Well it's heavy but I think I can fit it in. I'll have a look to see if I can just by-pass that first stage, then it'll turn at exactly the speed I need.
edit: never mind miss-read lol... so these will probably blow the tz85s... haha _________________ ( •_•)
Maybe you want an SSR for controlling it? I have a spare one somwhere
BTW A grinder attachment for lathe is good, but you can always do it by holding the grinder in your hand. It's highly accurate and quite exciting! _________________ <Patrician|Away> what does your robot do, sam
<bovril> it collects data about the surrounding environment, then discards it and drives into walls
Thu Apr 18, 2013 6:26 pm
Knightrous Site Admin
Joined: 15 Jun 2004
Posts: 8511
Location: NSW
Actually, I might be wrong then. If this image is exactly as your package
then it's different to the DD drives.
Ours are like this:
[img]http://i.ebayimg.com/00/s/NzY4WDEwMjQ=/$T2eC16hHJH8E9qSEYOjoBQmHw41KfQ~~60_12.JPG[/img]
The right handside support has a dual stages in it and the motor end has single stage. There is a 6mm hex shaft that drives from one side to the other.
If your worried about killing a 85A, run a pair of them, you just need to split the brushes up since these are 4 pole motors _________________ https://www.halfdonethings.com/
Thu Apr 18, 2013 7:22 pm
dyrodium Experienced Roboteer
Joined: 24 Aug 2004
Posts: 6476
Location: Sydney
Got the motor apart, and yeah it's a happy medium between the two.
Glen was right, the output ring gear thing grinds on the ring in the case, but at 30-40rpm or so I don't think it's a huge deal for combat robots.
And... I'll just leave this alcohol induced nightmare here:
_________________ ( •_•)
Joined: 19 May 2010
Posts: 3973
Location: ipswich QLD
oh cool...thats actually exactly the same sort as our winch's...the last stage of gearing is a little bit different...its the same with everything else though...unstopable _________________ Miles Blow - Julie Pitts
www.mulesfilm.com.au www.wombokforest.com.au
-Pickasso- Vivid Sportsman champion 2015
Sat Apr 20, 2013 11:25 pm
dyrodium Experienced Roboteer
Joined: 24 Aug 2004
Posts: 6476
Location: Sydney
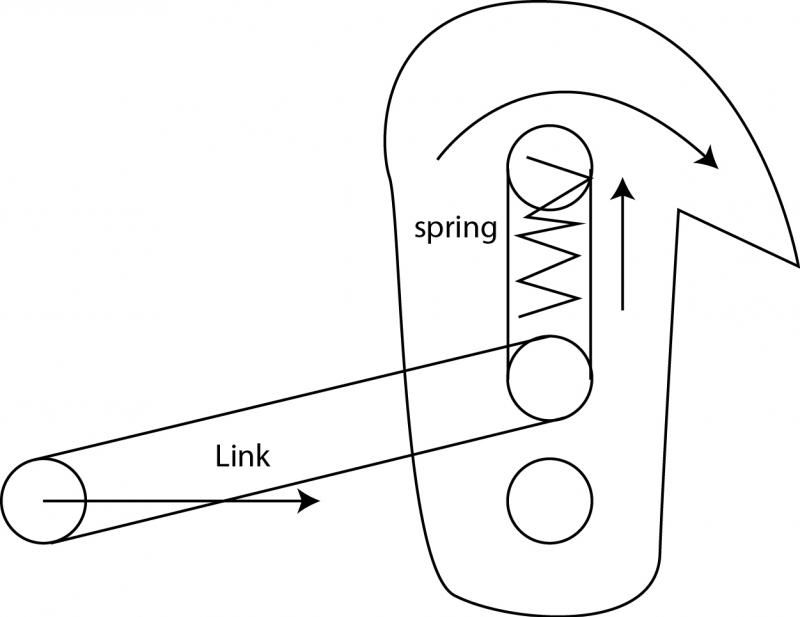
Hmm... did a test today to see just how much movement I get from the acme nut in the stock winch gearbox:
It's 'almost' fast enough in my eyes... but this test has shown that removing the final stage will make it far too fast and lose a significant amount of tasty crushing torque... Might have to lasercut a linkage test to see just how much claw movement this translates into...
Sorry the camera starts drifting from the vibrations
EDIT: Hmm yes.. certainly too slow considering that is on 5S - kinda not gonna last long. I'll look into removing the end stage and working on a longer linkage which can increase in reduction as pressure increases. _________________ ( •_•)
Yeah looks a tad slow - i was gonna suggest overvolt... lol _________________ <Patrician|Away> what does your robot do, sam
<bovril> it collects data about the surrounding environment, then discards it and drives into walls
Thu Apr 25, 2013 10:03 pm
Knightrous Site Admin
Joined: 15 Jun 2004
Posts: 8511
Location: NSW
Change your mechanism to a pulling action too, that way the thread is isn't in a compression state under load. This will stop it from bending the shaft or jamming the nut.
Also, have you considered using a right angle reduction from the winch (with full reduction) and mounting the arm directly to the end of the gearbox.
Something like bevel gears from a car diff (the spider gears) will be strong enough (hardened) and they are usually 1.2 to 1.6:1 in reduction. It would also end up more compact then a threaded rod setup _________________ https://www.halfdonethings.com/
Thu Apr 25, 2013 11:35 pm
dyrodium Experienced Roboteer
Joined: 24 Aug 2004
Posts: 6476
Location: Sydney
@ Aaron, yeah the mech actually already is going to be in tension, just was easier to get my head around the compression style design for the changing linkage. Those bevel gears look pretty neat... but I'm pretty set on the screw, a nice plan B however...
Woo well everyone's beavering away so I thought i'd go and get cracking on the winch mod. Thanks to Miles' awesome tutorial and picture guide it's going very nicely so far!
Here's the stub shaft with the bearing... Idea is a big phat ali coupler will go over the 20mm output shaft with a 6mm high tensile pin locking the two together... That then joins to the acme rod. I'm thinking this'll be the weakest point of the mechanism so if that pin shears I want it to be easy to replace, just hoping it wont shear too easy!
Next is to weld it into place, finish cutting the gearbox housing down and find some ali to fabricate a new face plate. Should probably get onto cadding a prototype linkage too... _________________ ( •_•)
You cannot post new topics in this forum You cannot reply to topics in this forum You cannot edit your posts in this forum You cannot delete your posts in this forum You cannot vote in polls in this forum

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports