|
|
|
|
|
|
|
|
|
|
|
|
Valen
Experienced Roboteer

Joined: 07 Jul 2004
Posts: 4436
Location: Sydney


|
it doesn't need to be over done, it just needs to be strong enough not to bend when you load it up, and when the robot decides to go flying across the arena and the frame is trying to encourage the motor to go with it ;->
I dunno about the chain guides, ideally you shouldn't have any long runs of chain like glen said, IE you should be sprocket || sprocket with almost no gap between. and like glen said the chain wrapping almost 180 degrees on each one.
Of course nothing is ever ideal but the closer you can get to that the better, the shock mount is good but be wary of it ripping apart, mostly you just attach the drive unit to the bot in such a way that you let the bot chassis deform it won't drag the frame around. (Like say 2 bolts on one side of the wheel hole, rather than 4 bolts around the entire hole, so if the hole gets deformed it won't drag the drive module out of square)
_________________
Mechanical engineers build weapons, civil engineers build targets
|
 Wed Oct 28, 2015 4:34 pm
Wed Oct 28, 2015 4:34 pm |
|
|
|
|
Rob Team Rotwang

Joined: 19 Jun 2004
Posts: 294
Location: Victoria
|
Chain on the incomplete Ref bot, plan is to have it for unsticking robots or putting them out if they're on fire. One way to get an 8 to 1 reduction, allows for all the weight to be on the two wheels mounted on a solid shaft with big bearings and lets the motor just do what it does best. Chains a bit vulnerable to derailment, hard to guard against all spikes in any wheel openings. Motors shimmed at the back to tension the chain.
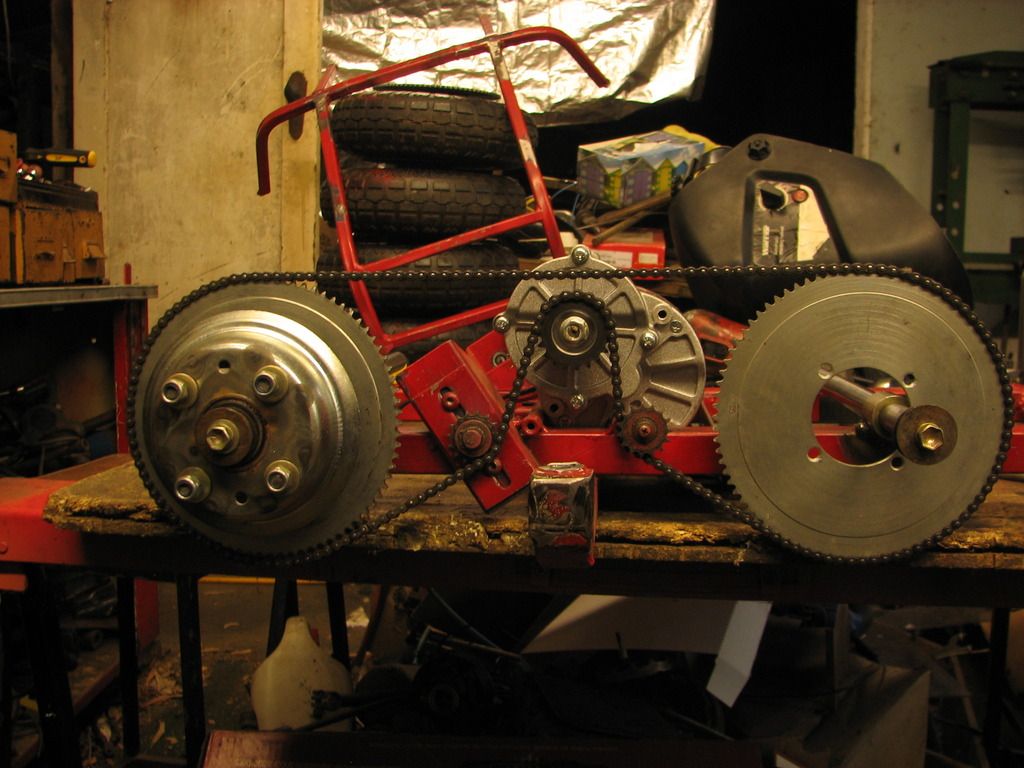
Something we currently have under way its going to be a special effects robot for a theatre company. Originally this bot was designed for an offroad competition with speed and stability mainly in mind. The sprockets are attached to the wheels and they’re huge 80 tooth sprockets which wasn't good when fighting maestro another Light weight. it all got bent and the chain came off. Mayve been better to have more reduction in the motor and smaller sprockets. Or multiple stage reduction.
Theres a video of us making those adapters. https://www.youtube.com/watch?v=j7VKHdyJIkg
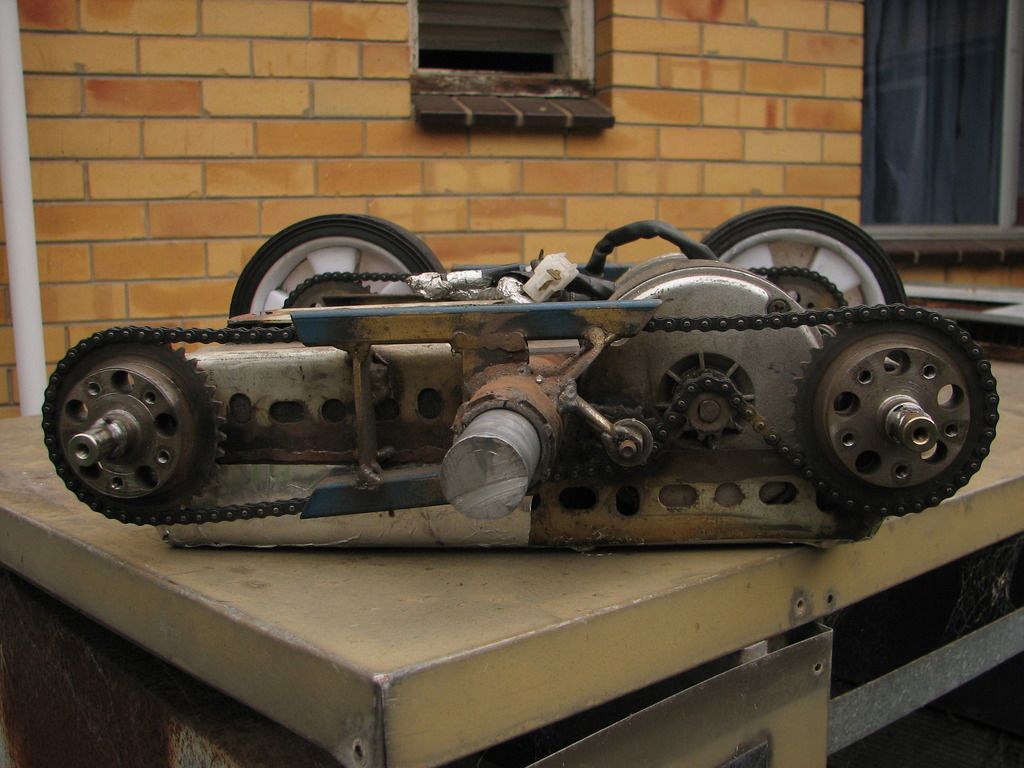
Weasel our light weight. Breaks all the rules with chain guides and hardly any chain on the drive motor. Never lost a fight as far as I know. Could be top ranking light weight in the country. Light weights are much better to utilize chain with the weight to play with. I dont think this could be done with a feather and still have armor. Yet in its class its a good way to get '4 wheel drive' with 2 motors, so the chains really doing two things, being the transmission of power to the wheels and also being the gearbox.
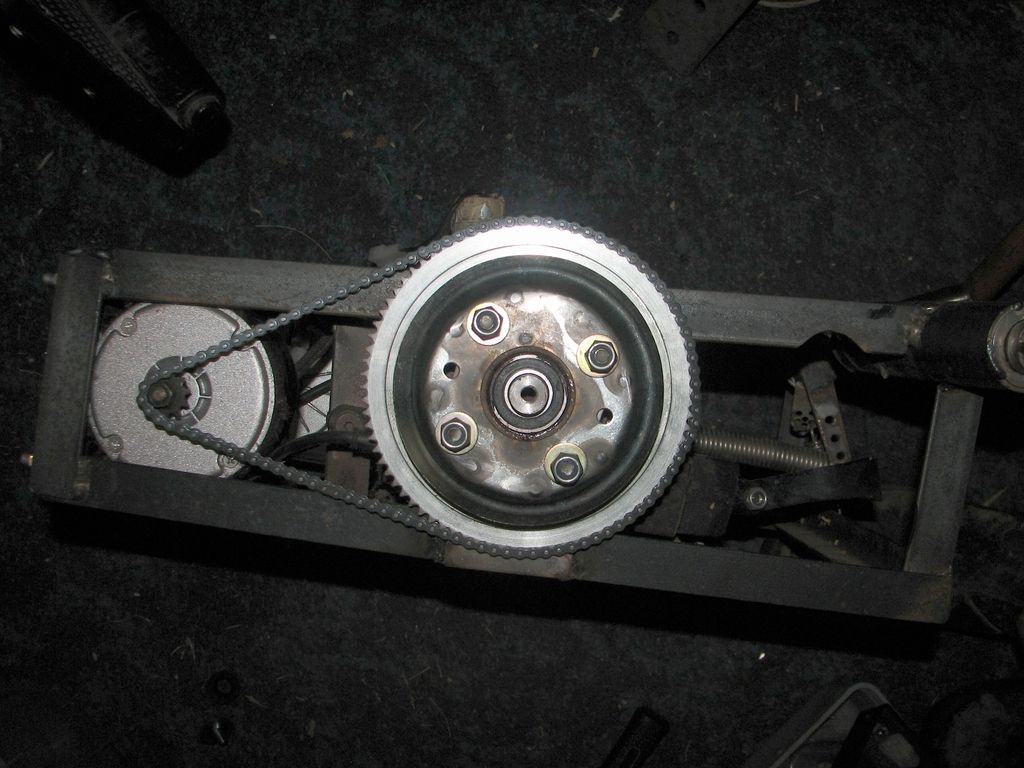
This might be the most you would do in a feather weight, keeping it all close together. the small teeth are good the chain has to climb a long way to fall off. the small number of components here is good, you get a good amount of wrap around. The closer the components are to the same size the better u get 180 wrap if they’re the same size but don’t get reduction. if you get it right you got a strong combination, you get it wrong, it falls off. it can be done.

_________________
My combat robot
Robowars on YouTube
RotwangRobotics
|
|
Sun Nov 08, 2015 1:28 pm |
|
|
|
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Technical Chat
RoboWars Australia Forum Index
-> Technical Chat




