|
|
Glen
Experienced Roboteer

Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect


|
Citizen Flips - Team Demon - NSW
If no one objects i might do another coalesced build thread for this robot now its been completed, just to make things easier to view 
Specifications
Drives - Banebots p60 16:1 with 4" blue wheels.
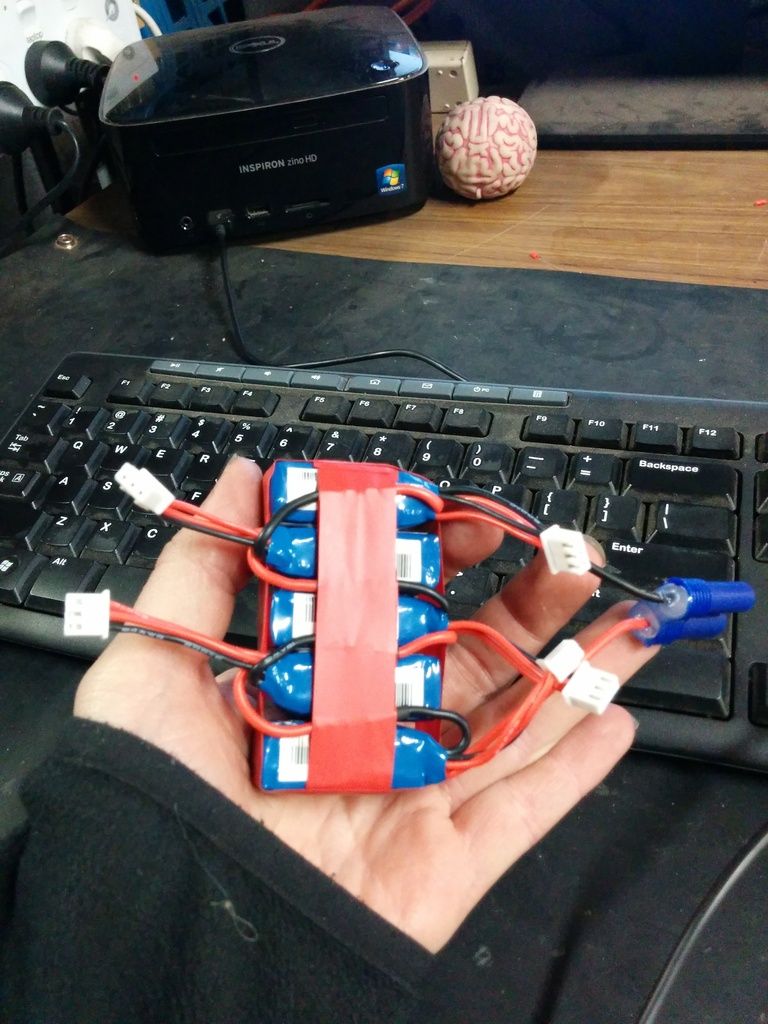
Batteries - 4s 2000mah for the drive and 5x 2s 350mah batteries in series for the flipper solenoid
weapon - Full pressure co2 flipper with a 70mm bore ram fed by a 1/2" burkert clone.
electronics - tz85 for drives, custom controller made with an arduino nano and freetronics ndrive module.
armour - 4.5 and 6mm hdpe with 3mm aluminium angle joiners. front structure and base are 3mm mild steel.
Fresh off the trip to the uk, there was only a a little over 6 weeks to recover and put something together for the vivid event. Was not too keen on doing something that required much effort but things obviously turned out very different 
The original plan was to take my old 50mm setup from hunchback, lighten it a substantial amount and fix the geometry issues it had and leave it much as it was. However, halfway through the process it was clear that building a new cylinder would be less work, plus with the left over 114mm round stock from decimators hubs, i could make something rather nice.
This is the old setup at 3.5kg - The steel cylinder needed turning down, from 5mm thick, the top got turned square and the base had slots milled out of it. Regardless, the tie rod design is not light at all and the shuttle valve is hillariously oversized. Time to start fresh.

Choppy choppy the remaining 2024. There's about $80 worth in this ram and 4kg worth. That all gets hacked down to 480 grams. What a waste!


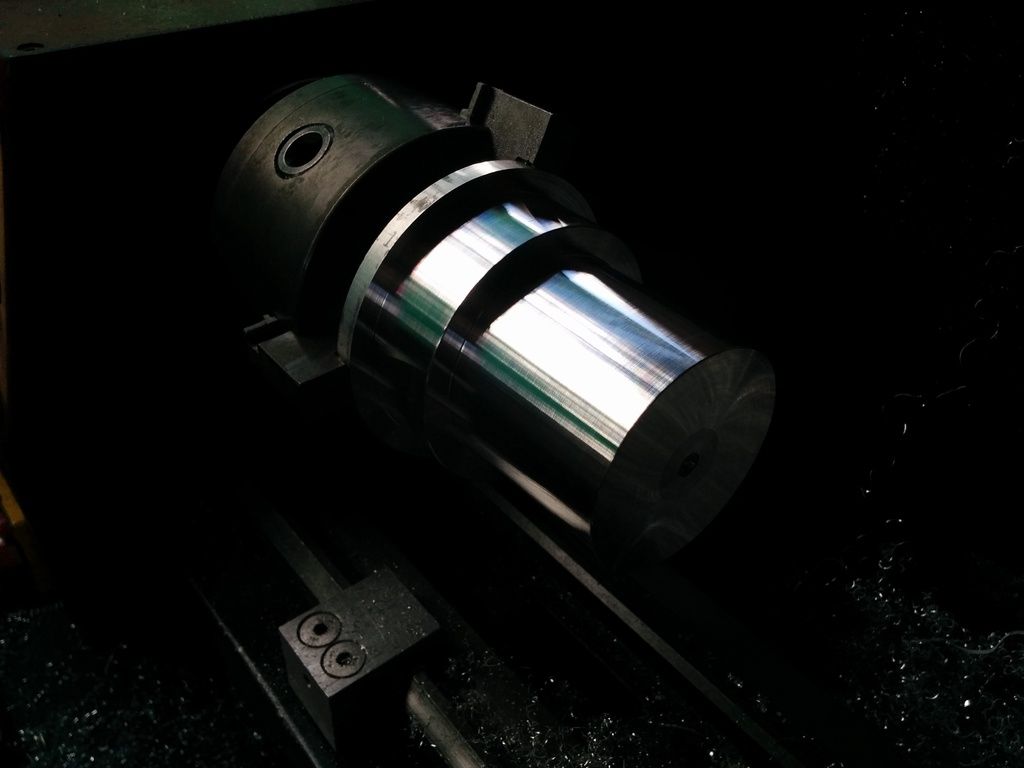
The outside is turned to size and the bushing hole bored out. The vfd conversion on the lathe made getting a nice finish easy, just play with the speeds till it comes out the best

Started to mock up the sizes. the old ram is about the same dimensions without the base. so i made sure the main stuff would fit and started cutting metal. Was going to have the valve and buffer at an angle so the upright arms could be longer, but ended up just placing them straight across in the end.

Next was something i hadn't tried before - doing such a large and long bore that needed a very nice finish. My tiny CCMT carbide boring bar was too small and the larger one didn't show up till the monday after i wanted this done by. So i bought a huge HSS one from hafco and milled it down to fit in the holder -

Took a few goes at regrinding it but eventually found a geometry that worked. Copying the CCMT insert vaguely did the trick.

The finish came out so nice. Mega happy with that!

All the lathe work done. Next to it is the base, its a piece of 10mm 5083 aluminium with a 2mm center section lathed in that fits into the ram bore.

Next is the top bushing made from UHMW. The original in hunchbacks ram was nearly 12mm thick, i figured i'd go the other way and see if it worked being very thin at only 3mm. Seems that it did in the end
I put a piece of 12mm sheet cut into a square onto the 30mm mandrel and machined it to size. That was actually a bit of a mistake as it didn't fit into the cylinder dead square - when pushed in a bit got sliced off meaning it went in crooked requiring me to rebore it in situ. I reckon that it's a little loose which most likely explains why the ram kept jamming at the top of the stroke. A bit mad that i didn't redo it!


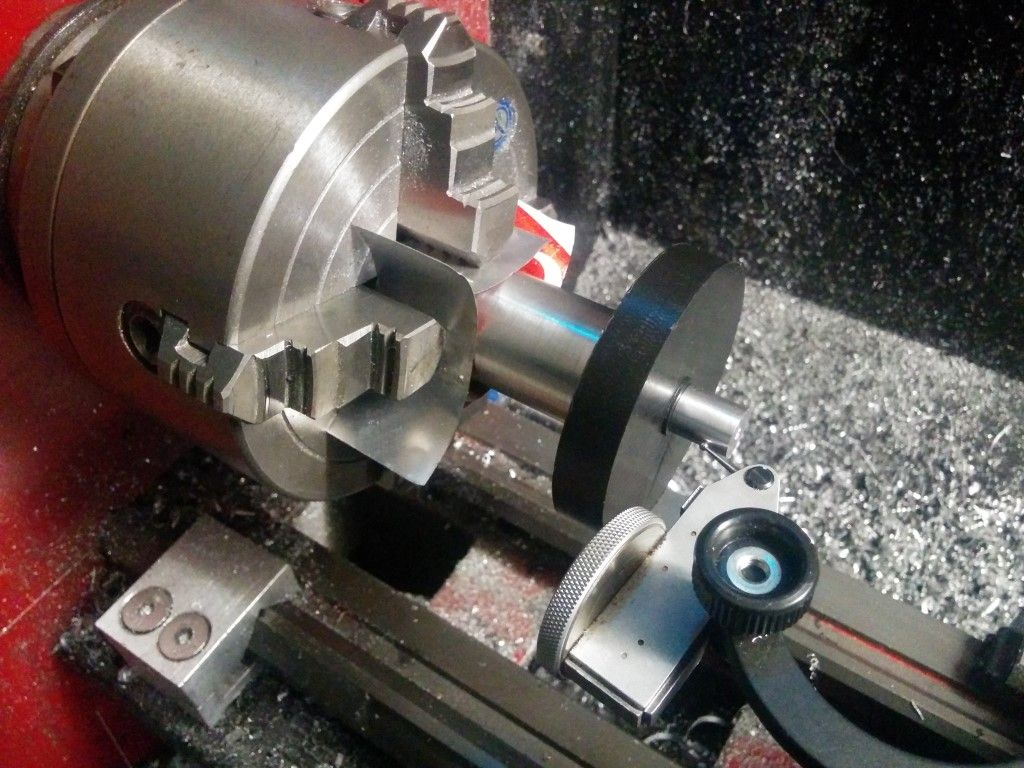
All the bits underway. The piston is 30mm diameter 2024 with a 12mm stub on the bottom the piston slides on to. A circlip stops the rod rocketing out of the cylinder Happy that worked.
Attached to the rod is a 12mm UHMW piston. The explosion guys in the UK were using a similar setup so figured it would be worth a try.

Not bad at all. Still had to drill the vent holes and bolt holes in the bottom.

With all the pneumatics underway t'was time for the frame. Now it was mostly done in this fashion with the vivid event in mind. No power tools and a tight schedule meaning being able to unbolt it all and bash it flat with a hammer on the floor or a shifter would be the go.
The uprights bolt to the base with 4x m6 bolts. The uhmw buffer tank mounts done in this pic too, they screw to the base with wood screws.

All tig welded up

And mounted along with the drives. The 3 holes are for a combination of bracing and being able to move the arm up or down to experiment with leverage ratios.

The main bottle mount took ages to work out. was considering making hinging uhmw mounts and all this other crap. The solution was really easy in the end. Two 8mm rods welded to one side and a huge Clamp holds it in. Can see the 30mm hole the burkert runs through in the side too.


The ram fits snug in between the arms. Tis rather large indeed!

Back to finishing the ram, hngg times running out! This is about 9 days before the event 
Machined the piston and bushing in place to get it all perfectly true as i mentioned earlier
Drilling the mounting holes in the base was a PAIN IN THE BUTT x 1000000. My mill isnt tall enough to drill with the rotary table and chuck on mostly. So i started a collection of drills with the shanks cut down to fit. Got her done in the end though. 10x m6s do the trick. its actually a 12 hole pattern with two left out for the valve to fit in.


Vent holes drilled in the ram and bushing. It's 4x 7.5mm holes i believe which is about 20% more area than the inlet hole. The bushing is actually bolted in with two m3 countersunks that are heavily recessed in from the underside. Lots of guys seem to do pressfits but the UHMW creeps alot so wasn't sure if that would work out. Was easy to bolt it in anyway

Shit yeah, not bad for a 70mm 50mm bore ram hey?

After a chat with Mario i found the bottles can be tapped out to 1/2" BSP instead of the 3/8 bsp i was using. More flow sounds good to me
What sounds less good however is the price of the big BSP taps. SEVENTY EIGHT FREAKIN DOLLARY DOOS.


The blow is somewhat softened by this being the best tap i ever bought, just wow it destroys metal. i tapped all the holes with one hand. the thing almost falls through the hole haha.
Some rather ramshackle jigging to get the hole done. Running a 19mm bit through a bottle held like this is a little nerve racking

Tappity tap

Next is the arm. The only two design aims were it had to be one continuous piece of box section and have a leverage ratio of 6:1 or more (meaning the ram moves 1mm to every 6mm the tip of the arm moves) - this looks about right.

Didn't chance using crap metal here, its 6mm "good stuff"

The tip is also the same metal - Decided to use the 2nd set of holes meaning the length of the arm is about 440mm. Quite light too being only 1.6mm 25x25 SHS. A little under 1.6kg in the end.

Finalising the gas works - The manifold is 2024 and the 2nd attempt. The first one was round but there wasnt enough meat in the threads on the side without flats - thus the square part

The purge valve that would come to haunt me screws in the top. The over pressure pop off valve will go in the other side when i can actually obtain one.
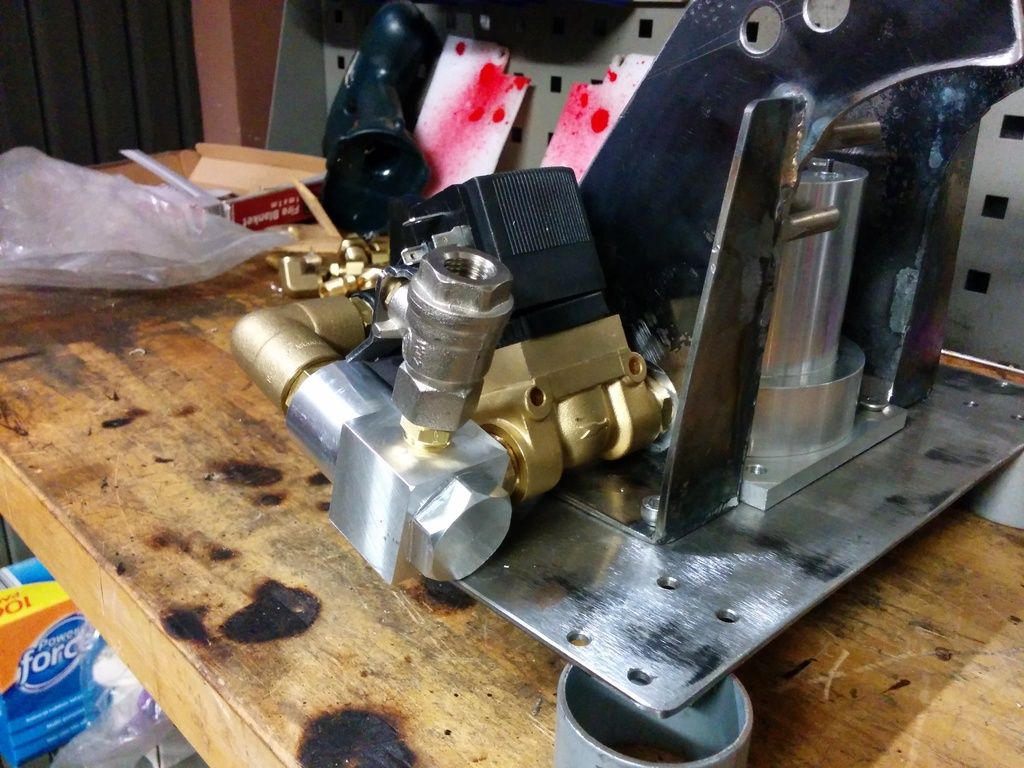
And the flow path - its two right angle bends which isnt great but it seems to do. Maybe welding a bung into the side of the buffer and running it straight through into the ram will be better again. Maybe when i'm more confident in my aluminium welding skills.

Last 5 days from here on in, eek!
Decided to make a hollow crumple zone on the front that i could bend back into the shape if needed. The tabs on the front hold the armour. Dont look at the terrible welds either, i only had chunky 3mm filler rod at home 

After a quick test it was obvious the ram wouldn't come down the last 10mm as well as it being absolutely ravaged with gas leaks. figuring the piston to be broken i frantically threw a piece of ali in the lathe and span up a new piston. I didn't actually get pics but it has a 69.85mm o ring on it that moves really freely in the bore. came out quite nice.
Eventually i found out the fitting that goes sideways in the ram protruded into the bore and was hitting the piston. Oops :S

Picked up the armour tuesday. Got it all from Plastix for $90. 6mm thick HDPE is the material.

Now the flipper battery. Apparently 24v isn't enough to reliably open the main firing valve, so it has to be over volted to 30v + Instead of using a boost converter i went with 5x 2 cell lipo packs in series. That worked well as i never had to charge it at only 350mah
Never worked out the balance setup though so i will have to do that soon haha.
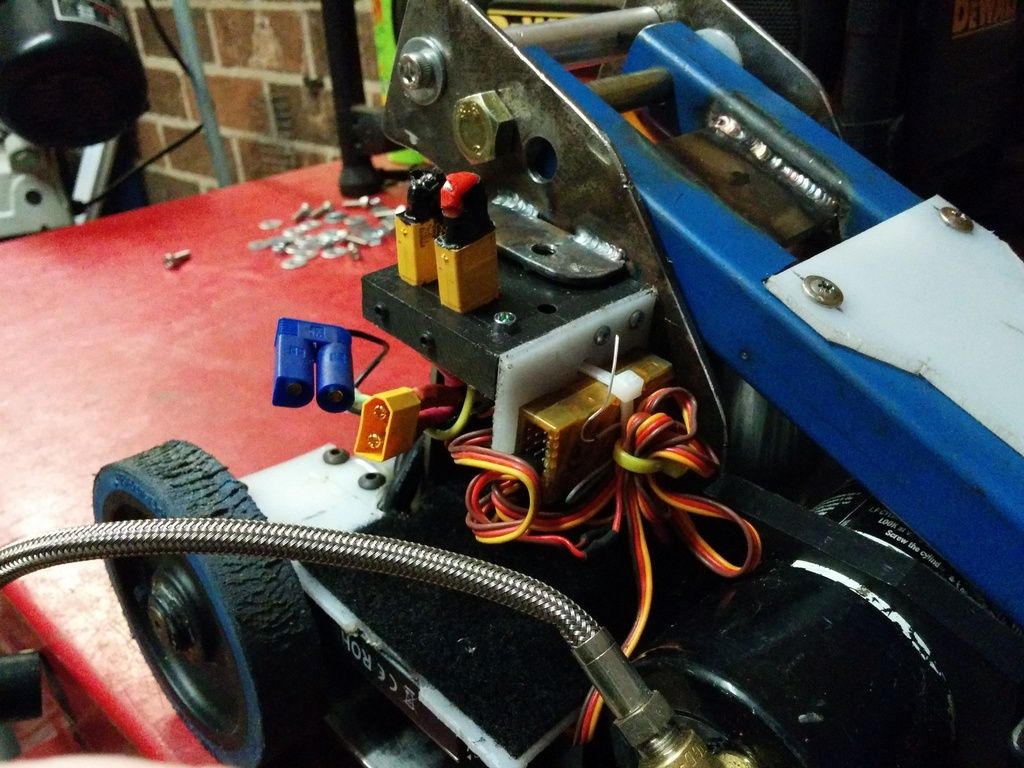
The leccytronics was very last minute but came out really nice. A strip of 3mm hdpe bolts to the right drive gearbox and a block of uhmw on the other side - the tz85s go underneath with VHB tape and the batteries sit on top with velcro.
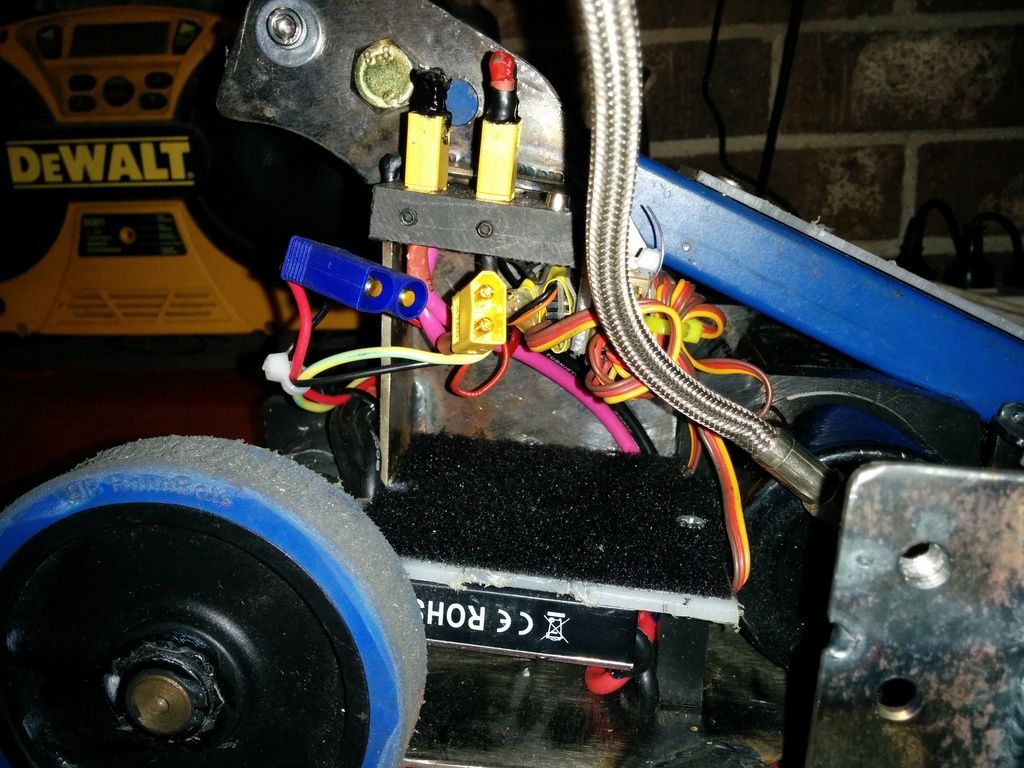
The links and LED are on some uhmw screwed to the flipper uprights, then the arduino and reciever are on a flap screwed to that so i can remove it easily. Annoyingly the LED for the flipper kept blowing its resistor? Wierd. perhaps it does not like 42v.
No pics but heres the complete armour. The joiners are just 3mm ali angle with lots and lots and lots of m4 bolts. Seemed to work out pretty nice given the rush job.
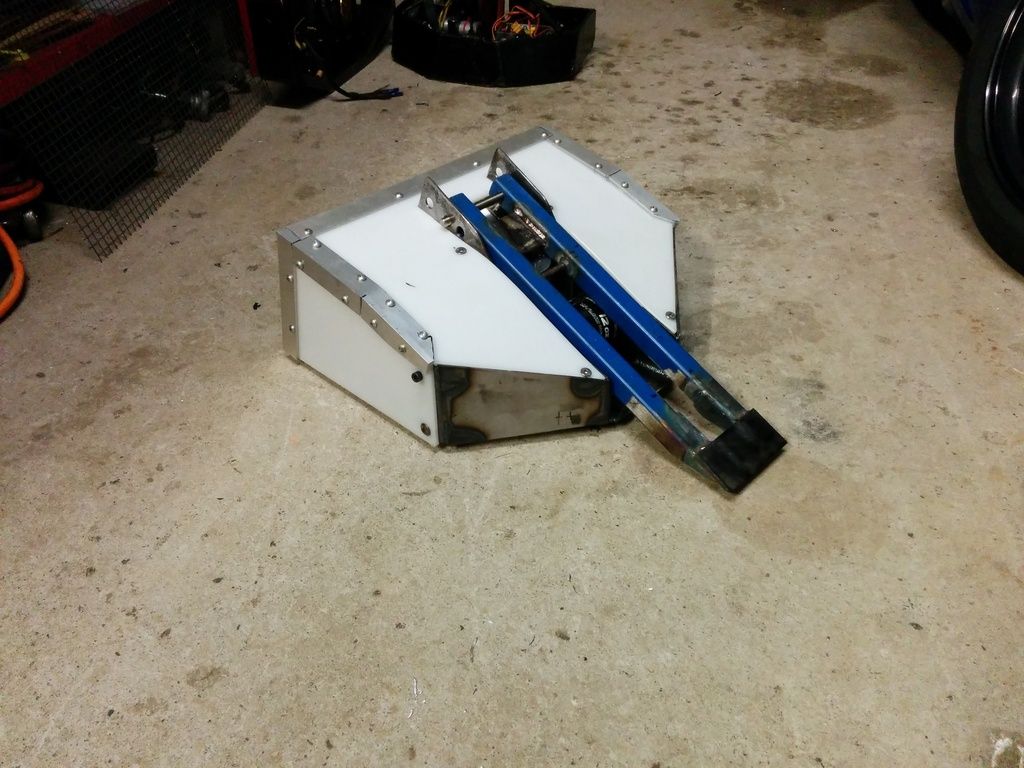
oh mah dear god, its underweight, by a lot! This is why you should finish early. There was so many things i should have added. Spikes to stop landing on the sides.. a wheely bar to get more flip power, etc etc!

100% done. Theres 3mm hdpe over the bungees, a magnesium brace on the back of the arms holding the flipper and even locking tabs on the front plus a link door to stop them falling out. So safe!

Post Mortem
All in all flips went really well 
The base has bent a tiny bit from the force but not a lot. Some simple bracing will fix that. The upright arms haven't bent at all which is a surprise, nor the 12mm bolt as the axle. I thought it was all well under built. Guess that bodes well for future redesigns.
No issues from the drives bar the banebots wheels being rubbish. I ruined one set. Either will remake new ones or just lathe down the banebots wheels and screw tread to them for the next event.
The armour has a few dents and scrapes but otherwise came out unscathed.
Flipper - well it had nice power in the end which was pleasing, and the arm didn't bend, what a surprise. Was sure it would. My bungee setup once again sucked as it was really hard to crank in enough tension and the cords couldn't "roll" around their mounting points enough resulting in them snapping part way through one fight. Shouldn't be too much of a hassle to sort out.
The other killer was the ram kept partly jamming at the top of its stroke which is why it couldn't self right on its back with the arm open nor come down quickly. I think its because of two things.
1 - i had to remachine the bushing square when it was mounted in the ram so it was too loose.
2 - the aluminium piston is only 7mm thick and with one o ring.
those things together mean that when the arm is fully open there is enough sideways force to jam it into the bore, needing a little knock to come down again. I reckon i will try the thick UHMW piston again and redo the top bushing to a better standard and it will be fixed.
The future!
Things i wanna do to it now
1) experiment with on time of the main valve. it was at 800ms for this event which was way too long. With less on time it should result in more flips at more power as the system isnt cooling down as much.
2) i've bought some uber expensive pressure transducers that i will mount into the buffer and ram so i can start datalogging what is going on for future redesigns. Possibly can even integrate that into controlling the firing of the cylinder too so it is load sensing.
3) do a much better bungee setup, thatll be easy with dedicted rollers and such.
4) make my own higher flow valve to replace the burket that won't need high voltage to trigger as well as work on getting the gas system sealed without having to epoxy the hell out of it!
Thanks, Hope you all enjoyed watching him as much as i did building it (sort of!)
_________________
www.demon50s.com - Minimoto parts
http://www.youtube.com/user/HyzerGlen - Videoooozzz
|
 Mon Jun 01, 2015 8:48 pm
Mon Jun 01, 2015 8:48 pm |
|
|
|
|
|
|
|
|
|
|
maddox

Joined: 21 Dec 2006
Posts: 786
Location: Belgium
|
The supplier of the Burkert clone does a 12V variant.
I just never bought it. As it needs be ordered with 5 in a batch.
I'm contemplating ordering a batch next month, 24V or 12V, doesn't matter that much to me, worst case scenario I put in a resistor.
( for excample , an old fashioned lightbulb, with 2 purposes. Heat up the CO2 and as indicator the valve is active.)
The Flow valve is overengineerd and needs regulated pressure to function.
The 1" bsp shuttle valve we use in Bullfrog is more compact compared to the let trough and a lot easier to make or control.
It uses a Burkert as pilot valve tough. Just to avoid any LP or liquid CO2 issues.
On the retract. We use 2 setups.
Long stroke rams. Retract the rod itself. Then the off angle jamming is a non event.
Short stroke rams, like in Hannibalito4/Defector and Bullfrog, just use a convex "strike plate" and a hard topped rod (I use alibronze) for better sliding surface.
Flips from a tank. Easy enough to get a theoretical value. A 20oz paintball bottle contains 307 liters of gas, with 50 bar of pressure @15°C.
70mm bore, 70mm stroke ram uses , idealy , 13.5 liters of gas. 22 flips.
But I calculate very negative, and give it 15 useable actions. (pessimists rarely get dissapointed)
[/list]
|
|
Tue Jun 02, 2015 4:59 pm |
|
|
|
|
|
|
Glen
Experienced Roboteer
Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
|
Time for some testing before i get captain flips ready for the nats. Before anything can be done, i need to quantify a few things.
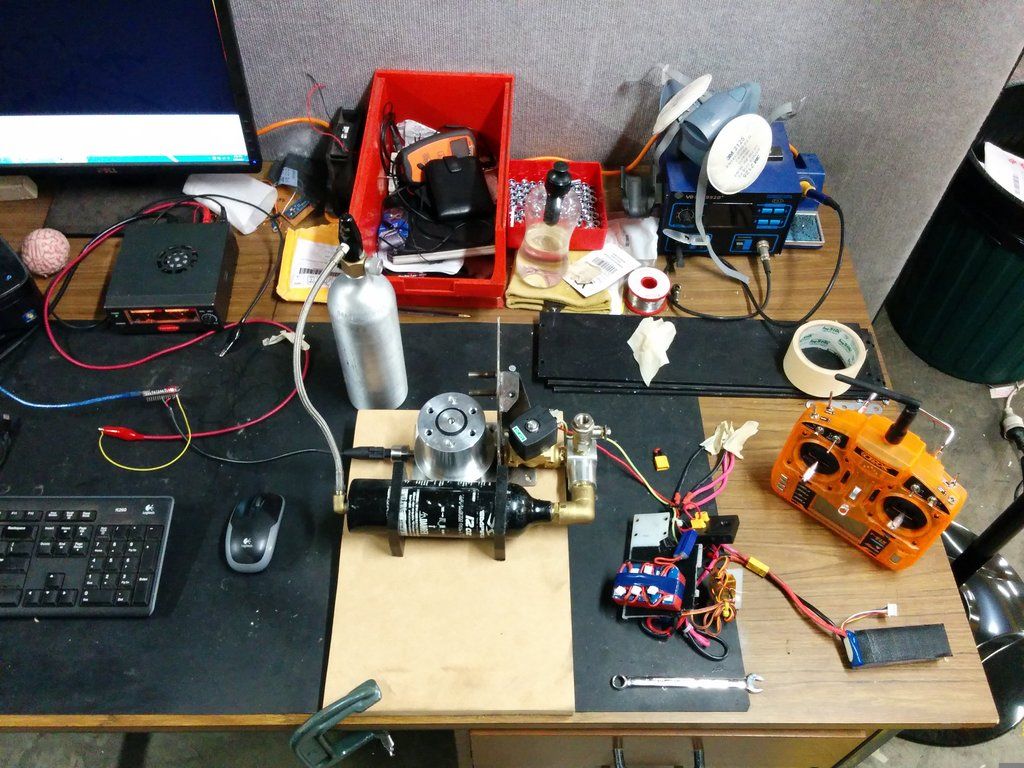
Purchased a very nice 1000psi pressure transducer/sensor and screwed that into the opposite side of the ram to see what's going on in there. Set up the arduino to read the sensor and stream it through terminal into excel where it can be graphed.
The setup is exceptionally basic, but now i know it works i'll tidy it up into something much more usable. Also going to integrate a potentiometer into the arm for position info as linear pots are too expensive to stick on the ram. It should be good enough.
The goals for this are:
- work out the actual cylinder peak pressure and when this occurs.
- find out how much the pressure drops over subsequent flips
- experiment with the cylinder vent hole size, being able to measure cylinder pressure should make it easy.
Later on, putting one into the buffer tank to measure the pressure drop through it should help to assess what size i will need for the next robot.
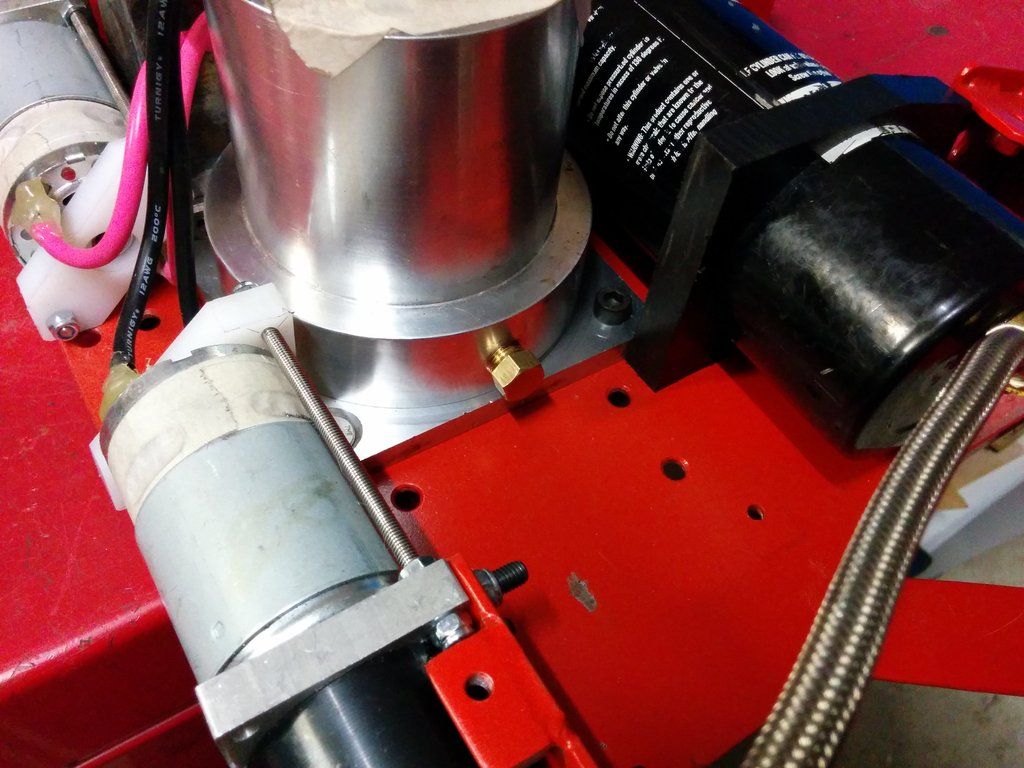
Anyway, Pics - Here's the setup - the pressure sensor is in the left side of the ram.
Sample of an unloaded flip with everything at ambient temp (about 15c). The bottom read out is milli's right out of the arduino and vertical axis is PSI. Will try set it up so the readout starts when pressure passes a threshold to make working out the timing easier.
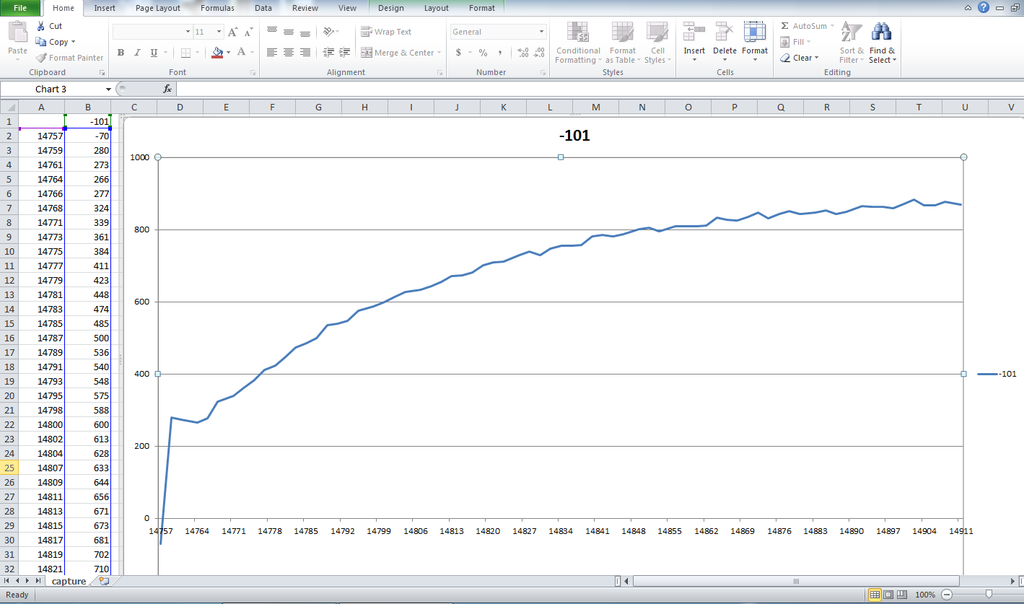
Nevertheless, some interesting points which were repeatable. Max pressure inside the cylinder is 900psi approximately. It holds pressure for a while before it vents through the hole. Based on that i reckon i can get away with a much bigger one without losing power. We will see.
Also at the start there's an actual drop in pressure of about 20psi over about 3-5 milliseconds, too hard to say what it might be from until i get positional data of the ram as well, but perhaps it's the ram extending at such a rate that the valve, which wouldn't be fully open by such time can't keep up causing a pressure drop? Something else to assess later anyway...
Time to peak cylinder pressure which i'd put at 800psi is 91 milliseconds.
Next is to put the pot on then flip some stuff, should be able to gather a fair bit of info from it!
Anyway, that's my nerdgasm for the month 
_________________
www.demon50s.com - Minimoto parts
http://www.youtube.com/user/HyzerGlen - Videoooozzz
|
|
Thu Jun 18, 2015 7:02 pm |
|
|
|
|
|
|
|
|
Glen
Experienced Roboteer
Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
|
Anyways, I'm just about done testing now, so won't be too long before the mods begin.
Here's what will happen.
- Additional bushing on top of the cylinder to stop it twisting at and jamming at the end of the stroke.
- New drives. The p60s have to go back in decimator. Was going to run another set of p60s but i really like the look of the magnums with the end supports. It'll be a pain in the bum making end supports for the P60 775 setups, so that's time saved. Running at 5s instead of 4 should mean more speed too.
http://www.robotpower.com/products/magnum775_info.html
- New wheels. The banebots wheels SUCK. Zero traction, zero life. etc. So swapping over to colsons from now on, some 3.5" x 1.5" ones i believe. Much more traction!
- Tweaks to the flipper controls. In the name of making things simpler i bought a 12v burkert coil. This will allow the whole robot to run off one single 5s battery, eliminating the need for the booster pack to run the 24v coil and the whole other set of switches, led's and wiring that come with it.
Also optimised the the cylinder on time which is now almost 10 times less than it was at the vivid event, with no reduction in power, meaning more flips at a higher pressure for longer!
Will have to add a wheely bar to the front as it's obvious the robot tilts foward as it flips, throwing away power. That alone should make a substantial increase in flip height
And lastly, the bungees are outta' here. I hate them with a passion. So going with a two stage strategy this time. A seat belt strap or two will act as a hard stop, preventing the arm going too far over, then a pair of large torsion springs on the arm itself will return it. No adjustment necessary if things go to plan.
That should be about it really.. he seemed to work quite well otherwise!
_________________
www.demon50s.com - Minimoto parts
http://www.youtube.com/user/HyzerGlen - Videoooozzz
|
|
Thu Jul 16, 2015 10:18 pm |
|
|
|
|
Glen
Experienced Roboteer
Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
|
Right-o. Decimator has a decent list of work to be done, so flips has to be done and dusted nice and early.
Here's a poorly documented 1.5 revision!
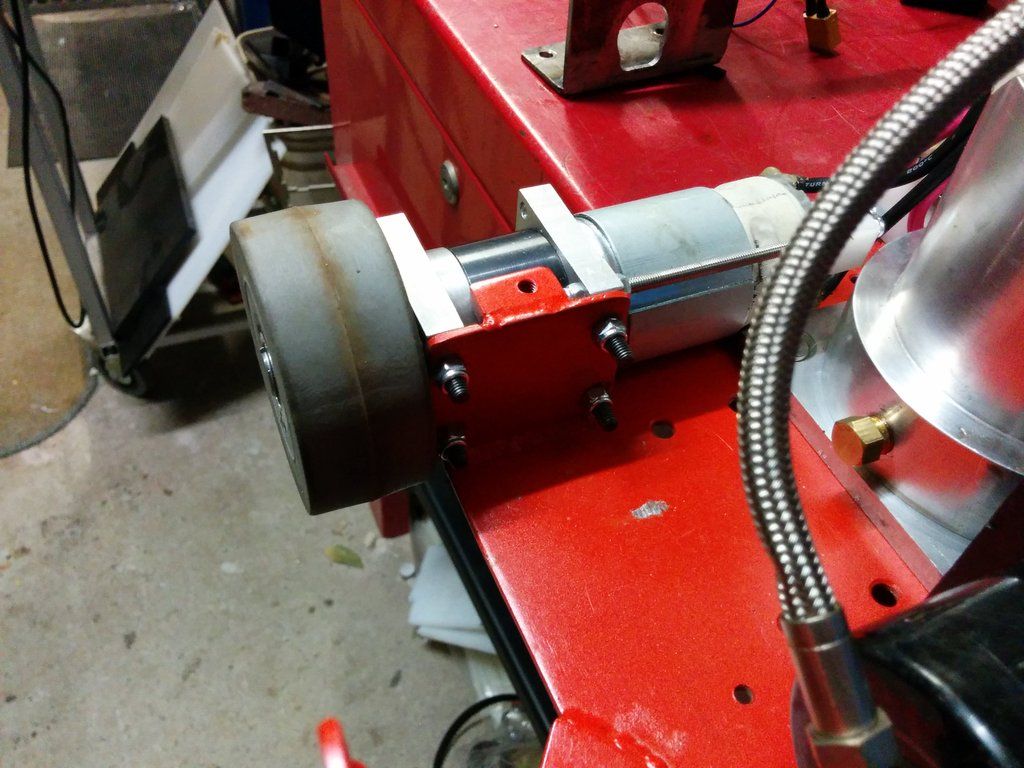
First up is the drive system. The motors had no support, so they half fell off. Also the wheels were terrible. So some chunky smaller diameter colsons did the job. Nick made these for me a while ago

As for the drives i got a pair of the botbitz ones to try out, they seem okay but one just binds up seemingly at random and the machining in them is ultra sloppy. I need to work out what its issue is otherwise I'll just go back to the p60s.
The shafts get cut down and a circlip groove cut in the end to retain the wheel. Also added some motor supports with m4 threaded rod as well as studs to make removing them easy.

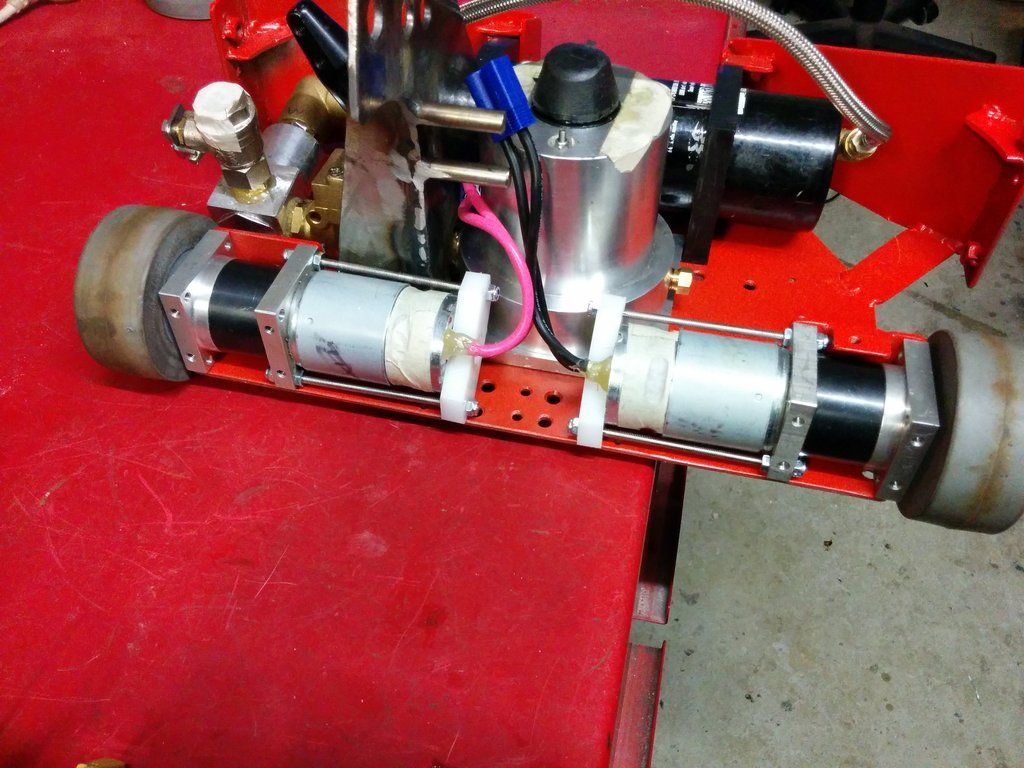
The mounting method is a 3mm steel plate welded vertically, this was to try stiffen the base to stop it warping, but its clear it doesn't help in testing and actually just bends the plate more than ever. Bit of a stupid idea really! I'll have to redo it.
I've revised the electronics to run off a single 4 cell which removed the rather over the top 10s mini pack, also removing the need for two links, greatly simplifying everything. The 12v Burket clone coil seems to be happy enough at that voltage.
Plugged up the hole for the pressure transducer now the testing is done. I highly recommend fittingsxpress in queensland, awesome service and a good selection of high pressure parts.
Now the most annoying part is my bandaid fix for the jamming flipper. Basically the top bush of the cylinder isn't chunky or tall enough, combined with the piston being too thin, so the whole thing binds easily at the top of its travel. I can't make the top bushing much bigger (easily anyway..) so i added the UHMW piston to the bottom of the existing one to make a hybrid. This seems to stop the jamming somewhat.
Unfortunately UHMW also soaks up oil and swells, meaning after a few nights the piston was jammed unbelievably hard and had to get bashed out with a drift. I machined a new one undersize and that seems to be okay now.
A proper fix for the cylinder will mean a complete rebuild unfortunately so this will have to do.

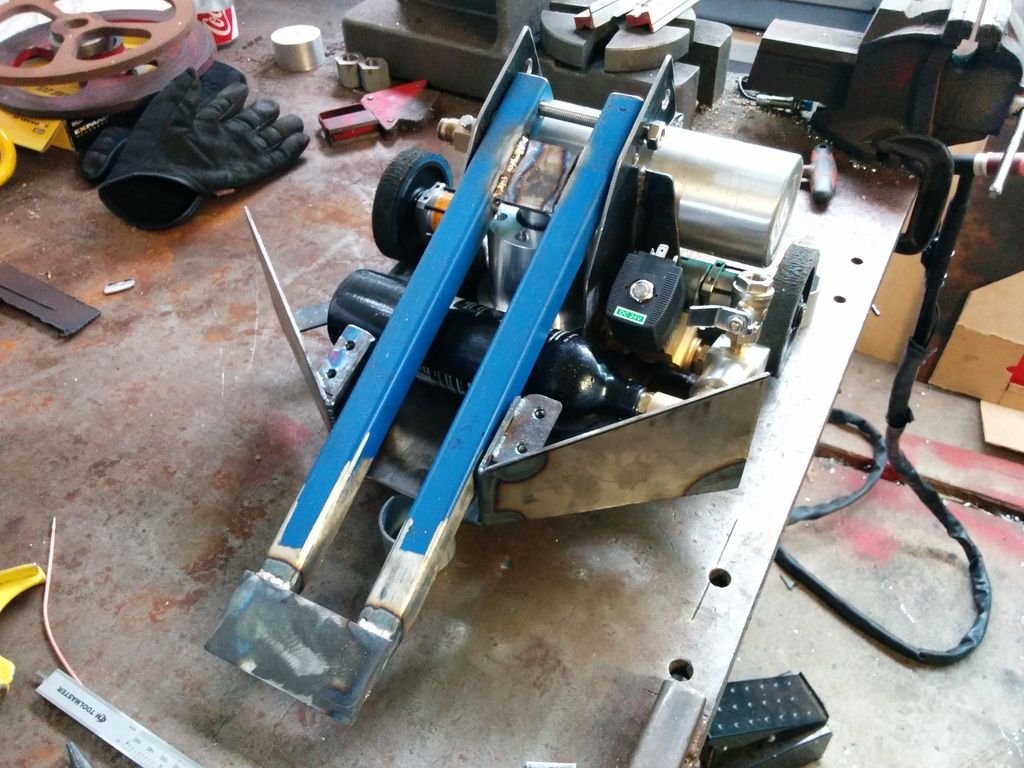
Next up was the bungee cord system. The last version didn't have enough length. So the bungee would exceed its 100% elongation and snap. This time they're around 3 times as long. The bungee ties to a loop welded to the base plate, then runs up over an 8mm rod on the flipper arm and ties to a balustrade eyelet that was supposed to be adjustable for length, but it weighed too much so has to be fixed for now.
Even so it makes removing the bungee to retension it infinitely easier. So we'll call that a win. It's given me lots of ideas for the rebuild though.

Played around with some bungee knots to work out what's best. I think this one has the smallest size and holds the best. No idea what it's called though Figure eight knot? The reef knot works awesome too for some applications.

Next up is to add a hard stop to the arm This has two purposes. One is to stop the arm flying back too far which makes the robot jump around too much, but also to stop the bungees stretching too far which is 100% the reason for them breaking I'm sure!

Laser cutter made short work of the webbing. The edge is so clean and crisp. Really happy with that little trick It clamps Under a 5mm piece of titanium used for the wheely bar then loops over another piece of 8mm rod.
And speaking of, the wheely bar is the last major change. Watch a video of flips fighting and the nose diving it suffers is rather severe. So a chunk of 5mm Ti bolts to the front to stop it tipping fowards. Hopefully that results in a large increase to the flipping height!

Annnd beauty shot

Plus a test vid, that tyre is about 8kg.
https://youtu.be/Vp5L5ZvP5ho
_________________
www.demon50s.com - Minimoto parts
http://www.youtube.com/user/HyzerGlen - Videoooozzz
|
|
Mon Sep 14, 2015 1:11 pm |
|
|
|

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports



