Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
Mental - Hellfire Labs - QLD
This is not intended to be a combat robot just yet but is being built as a test platform for a melty brain type drive. I have been reading about several guys in the US who have been experimenting with these and have always wanted to try it. For those who don't know what a melty brain is it is basically a thwack bot that is able to keep track of its position while spinning and use this info to pulse power to the drive motors to move the robot in one direction while still spinning. The reason it is called a melty brain is because it is so complicated that people feel their brains melt while trying to get them to work.
The most popular method, and the one I was originally planing to use is to have a fixed infrared beacon outside the arena that the robot can "see" and use that to determine which way it is facing. This is the method made famous by Herr Gepounden but has problems with light reflecting off the polycarb around the arena.
There are more mechanical methods which use a stationary bogey in the center of the robot such as team Whyachis Y-Pout and Why Not which work well but are non invertible. I did play around with the idea of using a chinese gear compass (
http://www.odts.de/southptr/LEGO/The_LEGO_Collection.htm#Type_Lanchester
) which would also have the advantage of being able to use just one drive motor but it would be a very complicated system.
As with all these things I put it on the back burner and only thought about it when I was bored. A couple of weeks ago I decided to see if my heading lock gyro could be used to make a balancing robot similar to a Segway. While the gyro was up to it my little ant weight gear motors where not but it got me surfing the net to see other guys who have done it. While searching these sites I noticed that all these guys used accelerometers alongside their gyros to compensate for drift so I started looking at those. While looking through various datasheets I noticed that in the list of suggested applications for one model was angular acceleration measurment. That got me thinking and after crunching some numbers it got me thinking even more. I mentioned this all to my brother and he said he knew all this already because some guy on the RFL forum was already doing it with his antweight Melty B. So after reading through his build report I have decided to give it a go. Have read for yourself:
http://www.spambutcher.com/meltyb.html
Details of the test platform:
Drive: 2x 100W scooter motors direct driving 95mm red wheels.
Batteries: 2x 11.1V 3700mAh LiPols in series.
Controller: ATMEL AVR ATMEGA128 Development Board from ebay.
Motor control: Couple of simple MOSFETS, caps, diodes and other junk.
Accelerometer: MMA2301EG +/-200g single axis accelerometer.
Pics coming soon. _________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
Sun Feb 10, 2008 4:18 pm
Valen Experienced Roboteer
Joined: 07 Jul 2004
Posts: 4436
Location: Sydney
Was thinking about it a while ago.
If you are running open loop (IE the LED flashes at the point it thinks of as being "forwards" and the human corrects it) then there is no need for accelerometers etc. Just tacho the wheels and use that to determine your position in terms of revolution. Yes its going to slip a whole bunch but it should be consistent rather than random, so you should be able to just tune it out with a control input. _________________ Mechanical engineers build weapons, civil engineers build targets
Tue Feb 12, 2008 12:09 am
kkeerroo Experienced Roboteer
Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
The problem with the "open loop" sensorless approach where the robot "guesses" its speed and the driver corrects it manually is that it is heavily dependent on the driver. It would require absolute concentration on the drivers or co-drivers part to keep the robot in control. This method has also been tried a couple of times and while it worked during practice it has been deemed impractical during actual combat. I also considered using encoders on the motors but that would have the same problem as to sensorless approach in that every bump, floor seam or piece of rubbish on the floor will throw off the timing.
Using an accelerometer will give a fairly accurate measurement of speed regardless of what the wheels are doing and considering you can get the sensors for less than $20 it makes sense to try it. _________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
Tue Feb 12, 2008 6:59 am
Knightrous Site Admin
Joined: 15 Jun 2004
Posts: 8511
Location: NSW
I've been speaking to Rich about Melty B for a few months now, I've got the accelerometer and other bits, just slowly (read "painfully") converting it into something my PicAXE 28X can handle.. Love the translational spinner design, most effecient spinner design possible, being able to add all your drive, batteries, weapon & armour into one big spinning weapon is just gnarly.
Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
Did some electrical testing of the 100W scooter motors. I connected each to a 24V 3300mAh Nimh pack via my Watts Up meter and manually loaded the wheels. Start up current was not quite 5A but but without a scope I can't check that fully. No load current settled down to 0.3A. With a spanner pressed against the wheel with enough force to start removing the rubber the current peaked at 12A. Max power output around 280W.
After looking at the above numbers I have now purchased a couple of 40A SSRs off ebay for $8 each. I am still worried about back emf and other transients but since these motors will only be turning one direction I can whack a couple of diodes directly across the motors and stick in a few caps as well. Only more testing will show if the SSRs will survive.
I also tried to order the accelerometer but the supplier wanted to charge $45US to ship a $10 part that can fit in an envelope. I am doing some more shopping around for that. _________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
Sat Feb 16, 2008 4:06 pm
Rotwang Experienced Roboteer
Joined: 15 Jun 2004
Posts: 1589
Location: Vic
Yes But he has to send you the free catalog and a back issue of a magazine they ran an add in to. All in a nice big box to keep everything nice and safe. _________________ Satisfaction is proportional to effort and results.
Sat Feb 16, 2008 4:18 pm
DumHed Experienced Roboteer
Joined: 29 Jun 2004
Posts: 1219
Location: Sydney
I have ordered some Analog Devices accelerometers (ADXL202E) from their "free samples" thing before, which might be worth a try if they still do it. _________________ The Engine Whisperer
- fixer of things
Sun Feb 17, 2008 12:43 am
Valen Experienced Roboteer
Joined: 07 Jul 2004
Posts: 4436
Location: Sydney
I got a few of them as part of their samples program too.
What are you looking for i might have one floating about _________________ Mechanical engineers build weapons, civil engineers build targets
Sun Feb 17, 2008 12:42 pm
kkeerroo Experienced Roboteer
Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
As in the first post I am looking for a MMA2301EG +/-200g single axis accelerometer from Freescale but a ADXL193 AD22283 from Analog Devices would also do. I have made enquiries about getting samples but since this is the weekend I am not expecting a reply until at least Tuesday.
The $45 shipping is a flat rate so I was looking at getting a few extra things to make it worth while. _________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
Sun Feb 17, 2008 1:53 pm
kkeerroo Experienced Roboteer
Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
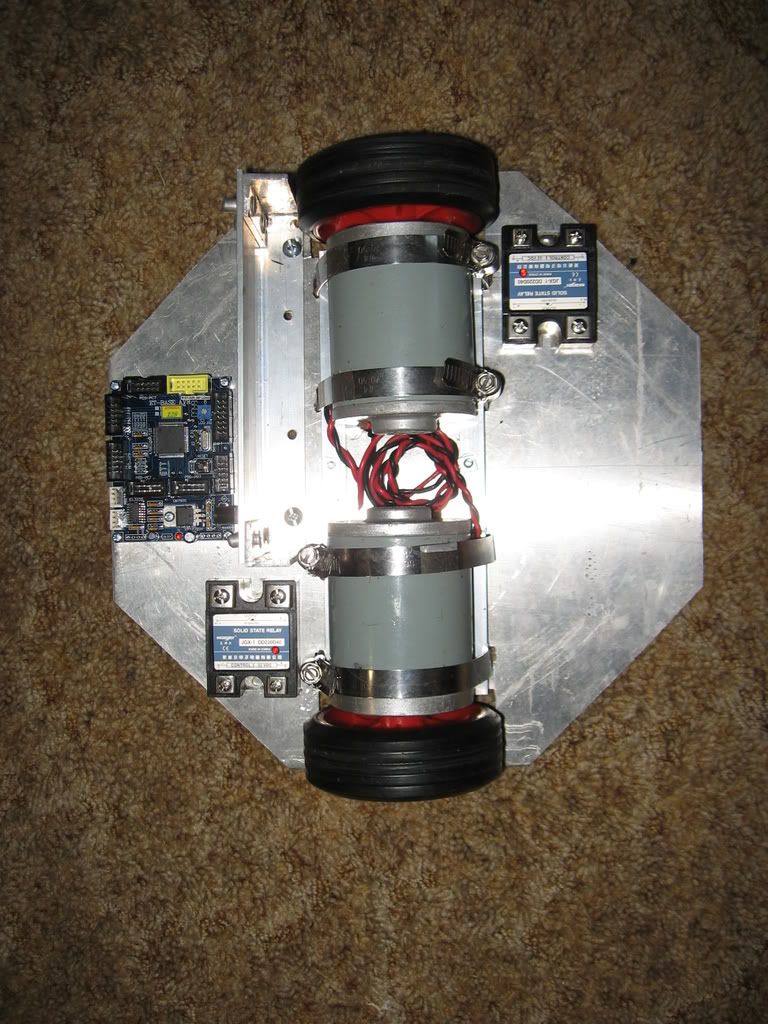
Well after a ridiculous wait for parts to get here here is a initial pic. Only one battery mount is half done so far.
_________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
Joined: 17 Jun 2004
Posts: 1459
Location: Brisbane
These SSRs are not from Jaycar and the reason I am using them was also explained in a previous post. They are 32V 40A DC-DC and cost $8 each plus postage. _________________ Get Some!!!
Secretary of the Queensland Robotics Sports Club inc.
You cannot post new topics in this forum You cannot reply to topics in this forum You cannot edit your posts in this forum You cannot delete your posts in this forum You cannot vote in polls in this forum

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports